
티스토리 뷰
[꼬부기/kobuki] slam
slam이란?
로봇의 위치 & 지도 만들기
위치를 알고 센서로 측정하고 지도를 만들면 네비게이션을 할 수 있다.
slam에는 여러 패키지가 있는데
그중에서
나는 gmapping을 도전!
gmapping - ROS Wiki
kinetic melodic noetic Show EOL distros: EOL distros: electric fuerte groovy hydro indigo jade lunar diamondback: Only showing information from the released package extracted on Unknown. No API documentation available. Please see this page for in
wiki.ros.org
ros에서 gmapping 패키지 다 있어서 적용하기 매우 쉽,,?
난 안쉬웠다 ^^
요즘에는 google cartographer를 많이 쓴다고 한다.

암튼
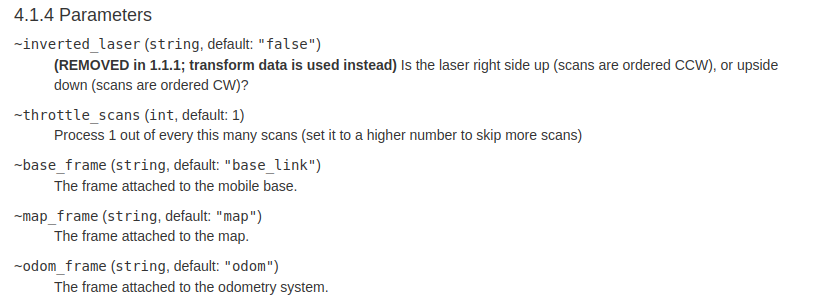
여러 파라미터들이 있는데
로스위키에서 찾아보고 쓰면 된다.
난 꼬부기 (turtlebot2)가 있어서 그것으로 진행했다. turtlebot3가 패키지가 잘 되어있어서 그걸 가지고 진행했다.
밑의 사진은 slam 관련 노드들의 처리과정이다.

직접 rqt를 이용해 나오는 것을 확인
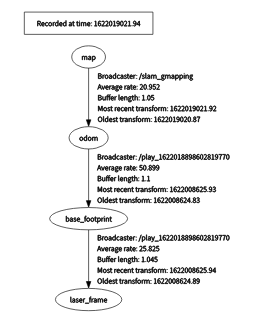
tf_tree를 살펴보면 우린 base_link가 아니라 base_footprint라서
rosrun gmapping slam_gmapping _base_frame:="base_footprint"
이런 식으로 설정해야한다.
gmapping을 돌리기 전에
rosbag을 이용하자
실시간 mapping은 잘 안된다.
그래서 센서들 오도메트리 등등 토픽을 저장하는 rosbag을 이용해
먼저 토픽을 저장하고
gmapping을 돌려
맵핑하자
http://wiki.ros.org/rosbag/Tutorials
rosbag/Tutorials - ROS Wiki
Recording and playing back dataThis tutorial will teach you how to record data from a running ROS system into a .bag file, and then to play back the data to produce similar behavior in a running system Reading messages from a bag fileLearn two ways to read
wiki.ros.org
친절히 알려줌
순서 정리
1. roscore돌리기
2. rosbag 사용법
$ mkdir ~/bagfiles
$ cd ~/bagfiles
$ rosbag record -a
when the recording is over, in a new terminal
$ rosbag info <your bagfile> (This is for data verification, so it doesn't matter if you don't run it.)
$ rosbag play <your bagfile>
$ roslaunch kobuki_run gmapping.launch3.gmapping
$ rosrun gmapping slam_gmapping _base_frame:="base_footprint"4. rviz 켜기
맵형성
5. map saving
rosrun map_server map_saver -f ~/map++추가로 rviz에서
fixed frame을 odom으로 해야 laserscan 도 잘 뜬다.
gmapping특성때문에 그런 것으로,, 들었다.
물어볼것
-rosrun으로 gmapping을 할려고 하는데 rviz에서 원하는 모양으로 맵이 형성이 되지않는다.
rviz에서 TF, Laserscan, map을 추가
add를 할 때,
map은 by topic에서 들고 올것
그래야 현재 토픽으로 들어오는 친구를 보여준다 아님 일일이 설정해줘야함
어제부터 오늘 계속 한 5시간동안 이걸 한 것 같은데 드디어 맵을 만들었다ㅜㅜ
아니
내가 했을 땐 죽어라 맵이 안생기더니
왜!!!!
도와달라고 부탁해서 틀었을 땐 되는걸까?

암튼 slam 완료.
'robot' 카테고리의 다른 글
| [gmapping map size] 맵 사이즈 변경 (0) | 2021.07.12 |
|---|---|
| [kobuki] 내비게이션 파라미터 조정 (0) | 2021.07.05 |
| [꼬부기/kobuki] navigation (0) | 2021.06.25 |
| 모바일 로봇 공부하기 (0) | 2021.05.03 |
| 바퀴 감속비 구하기 (0) | 2021.03.11 |
- Total
- Today
- Yesterday
- 2588
- cartographer
- diagrams.net
- 2163번
- c#
- 티스토리 코드블럭
- wpf 재생목록
- 10869
- 빈 txt
- 으에엑
- 재생목록
- SWEA
- 텐서플로우 #tensorflow # tensor #텐서 #flow #플로우
- 내 몸에서
- 어이구 두야
- 파일 올리기
- 4831
- gmapping
- add button
- #전기버스
- lwip
- 백준
- 버튼에 메뉴만들기
- 표처럼 코드가 나와요
- 버튼 클릭 시 메뉴
- 네트워크 구성도
- 6204
- WPF
- 꺼저
- rosbag
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |